مقدّمة عن الروبوت
المحتويات
مع انتشار مصطلح تعلم الآلة وازدياد الاهتمام بصناعة وتطوير الروبوتات سنتناول في هذه المقالة ما مدى استخدام التعلم الآلي في الروبوتات.
يمكن أن يُنسَب التقدّم في الروبوتيك إلى استخدام مجال تعلم الآلة وتطويراته.
في البداية سنعرّف ما هو الروبوت
ضجّ العالم بتسمية الروبوت فمنهم من يتخيّله رجلاً فضائياً خارقاً ومنهم من يقول أنه سيارة ذاتية الحركة والآخر يعتقد أن كل آلة في منزله هي روبوت، وقد يثار النقاش والجدل عن ما هو الروبوت وما هو ليس روبوت حتى بين علماء الروبوتيك.
يمكننا أن نأخذ تعريفاً للروبوت من موقع قسم كارنيجي ميلون سي اس Carnegie Mellon CS كما يلي
“التقاء الذكاء الاصطناعي بالعالم الحقيقي”. أما مختصة الروبوت أنكا دراغان من جامعة كاليفورنيا في بيركلي تقول: “أود أن أقول أن الروبوت هو وكيل agent ذكي اصطناعي يمكنه اتخاذ إجراءات لها تأثيرات على العالم الفيزيائي”، وتوافق كيت دارلينج، مختصة الروبوت في مختبر ماستوشيتس ميديا MIT Media على ذلك وتقول: “تعريفي للروبوت، نظرًا لعدم وجود تعريف عالمي، ربما يكون الروبوت جهازًا ماديًا يمكن برمجته عادةً بواسطة الحاسوب ويمكنه تنفيذ المهام بشكل مستقل”، أما دراجان Dragan فيقول: “الروبوت هو وكيل ذكي اصطناعي متجسد بشكل مادي، لكن العامل الذكي الاصطناعي بالنسبة لي هو عامل يعمل على زيادة منفعة الإنسان إلى أقصى حد” [1]، أي أن الروبوتات الذكية تُصمم لتلبية احتياجات المستخدم.
ويناقش الباحثون فيما إذا كان مصطلح الروبوت يشمل الابتكارات الحديثة مثل السيارات ذاتية القيادة أو الطائرات بلا طيّار المسماة دراون وغيرها من هذه الآلات المبتكرة. ومن خلال التعاريف التي ذكرناها قبل قليل في هذه المقالة فإن هذه الآلات تعدّ نوعاً من الروبوتات المحمولة mobile robots. أما النوع الآخر من الروبوتات فهو الروبوتات البشرية humanoid robots، وهو الأكثر صعوبة بسبب تحديات التحكم والنمذجة وغيرها، لذلك ربما تبدو أقل تطوراً وانتشاراً من غيرها باستثناء روبوتات الرعاية الطبية أو الروبوتات الخدمية والسلوكية، ويمكن أن تصنف الروبوتات حسب المهمة التي تقوم بها إلى أصناف عديدة مثل الروبوتات العسكرية والروبوتات التعليمية وروبوتات المراقبة والحماية من المخاطروأيضاً الروبوتات الفضائية وغيرها من الأصناف والمهام.
تتأثر علوم الروبوتيك بمجال تعلم الآلة، حيث أن 56.4 % من الباحثين يقومون ببناء تطبيقات الروبوتات و24.7 % منهم يستخدمون تعلم الآلة في مشاريعهم وفقاً لاستطلاع نشرته شركة Evans Data Corporation Global Development.
إن تطبيقات تعلم الآلة في الروبوتيك تسلّط الضوء على خمسة مجالات رئيسة وتفتح المجال لمزيد من الأبحاث في هذا المجال [2].
مجالات تطبيقات تعلم الآلة في الروبوتيك:
1- الرؤية الحاسوبية
يناقش بعض الباحثين مصطلح الرؤية الحاسوبية فقد يكون المصطلح الصحيح هو رؤية الآلة، أو رؤية الروبوت بدلاً من الرؤية الحاسوبية. حيث أن رؤية الروبوت أشمل من خوارزميات الحاسوب، فمثلا تمتلك الروبوتات عتاداً صلباً hardware كالكاميرا التي تعالج البيانات الملموسة الفيزيائية.
ترتبط رؤية الروبوت برؤية الآلة بشكل كبير حيث يمكن اعتبار أن للرؤية الآلية الفضل في ظهور الروبوتات الموجّهة وأنظمة المراقبة المؤتمتة. أما الاختلاف بين الرؤية الآلية ورؤية الروبوت تتبين في قدرة الروبوت على الحركة في بيئته المحيطة والتأثير فيها بالتالي فإنه يحتاج عند الرؤية إلى معايرة للإطار المرجعي باستمرار أي أن عملية الرؤية تكون مترافقة مع حركة الروبوت.
أدّى تدفق البيانات الضخمة كالمعلومات المرئية المتاحة على الويب (مثل الصور ومقاطع الفيديو المسمّاة أو الموصّفة) إلى دفع التقدم في الرؤية الحاسوبية، الذي ساعد بدوره على ازدياد تقانات التعلم التنبؤي بالاعتماد على تعلم الآلة في الجامعات مثل جامعة كارنيجي ميلون وغيرها، مما يؤدي إلى تطبيقات رؤية الروبوت مثل تحديد وفرز الأشياء، وبناء الأنظمة القادرة على تحديد الأخطاء في رقائق السليكون وتقييمها باستخدام شبكات الطي العصبونية.
إن تقانات الحساسات مثل الرادار والّيدار والأمواج فوق الصوتية يساعد في تطوير الأنظمة التي تعتمد على الرؤية بزاوية 360 درجة مثل المركبات ذاتية القيادة والطائرات بدون طيار درون.
2- التعلم بالمحاكاة
يرتبط التعلم بالمحاكاة ارتباطًا وثيقًا بالتعلم بالمراقبة، وتعلم المراقبة هو سلوك يظهره الرضع والأطفال الصغار [3]. كما أن التعلم بالمحاكاة هو صنف شامل عن التعلم المعزّز reinforcement learning ، حيث يتفاعل الوكيل مع البيئة environment وفق سياسة policy معينة، فيتخذ فعلاً action بناء على هذه السياسة من أجل كل حالة في البيئة ويستقبل مكافأة على فعله وينتقل إلى الحالة الثانية. والهدف من ذلك هو تعلم السياسة المثالية التي تزيد المكافآت/ المردود التراكمية.
إن المكوّن الأساسي للتعلم بالمحاكاة هو البيئة، والتي تتمثل بشكل أساسي بمخططات ماركوف الاحتمالية والتي تحوي النموذج الرياضي للحالات والأفعال والانتقالات، لذلك تعتبر النماذج الاحتمالية من الميزات المشتركة لطرق تعلم الآلة.
لقد طُرح تساؤل منذ عام 1999 فيما إذا كان التعلم بالمحاكاة يُستَخدم للروبوتات البشرية.
بما أن الإنسان يستطيع إنجاز مهمة معينة بمراقبة شخص آخر يؤدي هذه المهمة، فكذلك يمكن برمجة الروبوتات لتتعلم تقليد ومحاكاة البشر، لكنها تحتاج إلى التدرّب على سلسلة من عرض سلوك الخبراء demonstrations قبل أن تؤدي السلوك المطلوب.
أصبح التعلم بالمحاكاة جزءاً أساسياً في مجال الروبوتيك، فعدم سهولة التنقل خارج إطار المصنع تجعل برمجة الروبوت يدوياً أمراً صعباً وذلك في مجالات عديدة مثل الزراعة والبناء والبحث والإنقاذ والجيش وغيرها.
لتطبيق التعلم بالمحاكاة يمكن استخدام طرق التحكم العكسية المثالية، حيث يقوم التحكم العكسي المثالي، من خلال تحديد مجموعة من الوظائف الأساسية (أو الميزات)، بتعلم الارتباط الصحيح للمصطلحات الحسية التي تحدد سياسة محاكاة الخبير[4]. أو استخدام البرمجة عن طريق عرض سلوك الخبراء والتي تم تطبيقها من قبل CMU والمنظمات الأخرى العاملة في مجال الروبوتات البشرية.
نشر باحثون من ولاية أريزونا هذا الفيديو قبل عامين يظهروا روبوتًا بشريًا يستخدم التعلم بالمحاكاة لاكتساب تقنيات استيعاب مختلفة.
كما يمكن استخدام شبكات احتمالات بايزيان وتطبيقها في نماذج التسلسل الأمامي التي يتعلم الروبوت من خلالها بدون معرفة مسبقة لنظامه الحركي أو بيئته الخارجية.
3– التعلم الذاتي بإشراف Semi-Supervised Learning
تتطلب خوارزميات تعلم الآلة بإشراف Supervised Learning مجموعة بيانات مسمّاة labeled dataset يدويًا إما من قبل مهندس تعلم الآلة أو عالم البيانات. ,وعملية تسمية البيانات مكلفة للغاية، خاصة عند التعامل مع كميات كبيرة من البيانات [5].
يمكن التخلص من هذا العيب في خوارزميات تعلم الآلة بإشراف باللجوء إلى خوارزميات تعلم الآلة بدون إشراف Unsupervised Learning،لكن سيكون نطاق التطبيق في هذه الخوارزميات محدوداً. ، لذلك تم تقديم مفهوم التعلم الذاتي بإشراف، الذي يقوم بتدريب الخوارزمية على مجموعة من البيانات المسمّاة وغير المسمّاة أي ستحتوي مجموعة البيانات على كمية صغيرة جدًا من البيانات المسمّاة وكمية كبيرة جدًا من البيانات غير المسمّاة [6].
عند تطبيق التعلم الذاتي بإشراف في مجال الروبوتيك ستقوم الروبوتات من خلال طرق التعلم الذاتي بإشراف بتوليد بيانات التدريب الخاصة بها لتحسين الأداء وذلك من خلال استخدام تدريب مسبق وبيانات تم التقاطها من مسافة قريبة لتشكل البيانات المسمّاة وتكون بيانات الحساسات بعيدة المدى بيانات غير مسمّاة.
وبالتالي فإن هذه المنهجية تساعد الروبوتات والأجهزة البصرية على الكشف عن الأشياء ورفضها مثل الغبار والثلج، أو تحديد الخضروات والحواجز في التضاريس الوعرة، وفي تحليل المشهد ثلاثي الأبعاد ونمذجة ميكانيك السيارة.
يشكل بوت المشاهدة Watch-bot مثال ملموس [7] ، تم إنشاؤه من قِبَل باحثين من كورنيل وستانفورد، يستخدم مستشعر ثلاثي الأبعاد (Kinect) ، وكاميرا ، وكمبيوتر محمول ، ومؤشر ليزر لاكتشاف “النشاط البشري الاعتيادي”، وهذا النشاط هو أنماط يتعلمها من خلال الأساليب الاحتمالية.

يستخدم بوت المشاهدة Watch-Bot مؤشر ليزر لاستهداف الجسم المراد تذكير البشر به (على سبيل المثال ، الحليب الذي تم تركه خارج الثلاجة).

في الاختبارات الأولية ، تمكن الروبوت من تذكير البشر بنجاح بنسبة 60 في المائة، ووسع الباحثون التجارب من خلال السماح للروبوت بالتعلم من مقاطع الفيديو عبر الإنترنت (تسمى مشروع روبوت المشاهدة RoboWatch).
تتضمن الأمثلة الأخرى لطرق التعلم الذاتي بإشراف والمستخدمة في الروبوتات خوارزمية الكشف عن الطريق في كاميرا ذات رؤية أحادية Moncular ومزودة بنموذج توزيع احتمالي للطريق (RPDM) وخوارزمية آلة دعم المتجه الترجيحية (FSVMs) المصممة في معهد ماستوشيتس للتقنية MIT للمركبات ذاتية القيادة وغيرها من الروبوتات المتنقلة في الطرق.
تم تطبيق التعلم الذاتي autonomous learning على مهام الروبوتات والتحكم، حيث يشكل التعلم الذاتي نوعاً من التعلم الذاتي بإشراف لكنه يتضمن التعلم العميق وطرق التعلم بغير إشراف.
قام فريق في إمبريال كوليدج في لندن، بالتعاون مع باحثين من جامعة كامبريدج وجامعة واشنطن، بإنشاء طريقة جديدة لتسريع التعلم وذلك من خلال دمج النموذج الاحتمالي مع التخطيط طويل المدى وتعلم التحكم، مما يقلل من تأثير أخطاء النموذج عند تعلم مهارة جديدة.
يتم تطبيق منهج تعلم الآلة الإحصائي هذا في الفيديو أدناه:
4- التقانات الطبية المساعدة
إن الروبوت المساعد وفقاً لتعريف دافيد جيف من جامعة ستانفورد، هو جهاز يمكنه الشعور بالمعلومات الحسية ومعالجتها وتنفيذ الإجراءات التي تفيد الأشخاص ذوي الإعاقة وكبار السن، وهذا لا ينفي وجود التقنيات المساعدة الذكية لعامة الناس، مثل أدوات مساعدة السائق.
توفر روبوتات العلاج الحركي فائدة تشخيصية أو علاجية لكن هذه التقنيات لا تزال (وللأسف) محصورة في المخابر فقط، لأن تكلفتها باهظة لمعظم المستشفيات في الولايات المتحدة وغيرها من الدول.
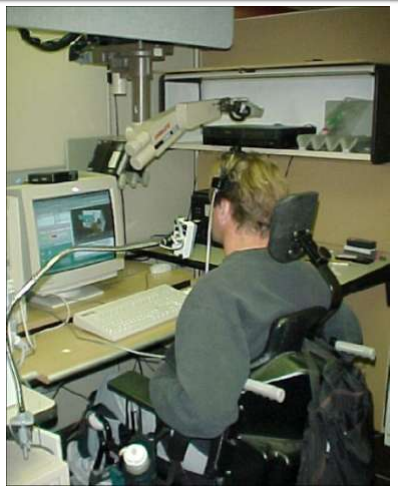
ومن الأمثلة على التقانات المساعدة هو الروبوت المساعد المهني المكتبي ديفار DeVAR, or desktop vocational assistant robot، وهو محطة عمل روبوتية يتم التحكم فيها صوتيًا مصممة لتمكين الأشخاص الذين يعانون من إعاقات حركية شديدة من العمل بشكل مستقل في بيئة العمل. ولقد تم تطويره في أوائل التسعينات من قبل جامعة ستانفورد و بالو ألتو Palo Alto التابعة لها لشؤون البحث والتطوير.
ويتم تطوير أمثلة أحدث على التقنيات المساعدة الروبوتية المبنية على تعلم الآلة والتي تشمل الجمع بين المساعدة والاستقلالية، مثل الذراع الروبوتية ميكو MICO (التي تم تطويرها في جامعة نورثويسترن) والتي تستخدم حساس كينكت Kinect. ويتألف حساس كينيكت من كاميرا ذات ألوان RGB ومن حساس للعمق يعتمد على الأشعة تحت الحمراء ومن خلاله يمكن رؤية البيئة بطريقة ثلاثية الأبعاد ومصفوفة من المايكروفونات. [8].

ستكون الروبوتات المساعدة أكثر تعقيدًا وأكثر ذكاءً لتتكيف بسهولة أكبر مع احتياجات المستخدم ولكنها تتطلب أيضًا استقلالية جزئية (أي مشاركة التحكم بين الروبوت والإنسان).
تتقدم منهجيات تعلم الآلة المطبقة على الروبوتات في عالم الطب بسرعة، على الرغم من عدم توفرها بسهولة في العديد من البيئات الطبية.
يتعاون الباحثون في مركز الأتمتة والتعلم للروبوتات الطبية Cal-MR ويشمل التعاون الباحثين من جامعات مختلفة ومجموعة من الأطباء. ونتيجة لهذا التعاون تم إنشاء الروبوت النسيجي الذكي المستقل STAR والذي تم اختباره من خلال نظام الصحة للأطفال في العاصمة واشنطن. يستطيع روبوت STAR تجميع “أمعاء الخنازير” (المستخدمة بدلاً من الأنسجة البشرية) بدقة وموثوقية أفضل من الجراحين البشر وذلك باستخدام الابتكارات في التعليم الذاتي و الحساسات ثلاثية الأبعاد.
يقول الباحثون والأطباء أن ستار STAR ليست بديلاً للجراحين – الذين سيظلون في المستقبل يتعاملون مع حالات الطوارئ. ولكن هذه الروبوتات مثل ستار STAR تقدّم فوائد كبيرة في إجراء أنواع مماثلة من العمليات الجراحية الدقيقة.
5- التعلم متعدد الوكلاء
النظام متعدد الوكلاء هو نظام محوسب يتألف من عدة عوامل ذكية متفاعلة. يمكن للأنظمة متعددة العوامل حل المشكلات التي يصعب أو يستحيل على الوكيل الفردي حلها.
التنسيق والتفاوض هي المكونات الأساسية في التعلم متعدد الوكلاء، والذي يتضمن الروبوتات المبنية على تعلم الآلة أو ما ندعوه بالوكيل، لقد طٌبقت تقنية الوكلاء بشكل كبير على الألعاب القادرة على التكيف على تغيير المشهد للروبوتات / الوكلاء الآخرين. تتضمن أمثلة مناهج التعلم متعدد الوكلاء أدوات التعلم بدون ندم No-Regret Learning Tools ، والتي تتضمن خوارزميات تثقيل “تعزز” نتائج التعلم في التخطيط متعدد الوكلاء ، والتعلم في أنظمة التحكم الموزعة القائمة على التسويق.
من الأمثلة الواقعية على التعلم متعدد الوكلاء هو خوارزمية للوكلاء الموزعين أو الروبوتات التي أنشأها باحثون من مختبر المعلومات وأنظمة اتخاذ القرار في معهد ماساتشوستس للتكنولوجيا MIT في أواخر عام 2014 [9]. تعاونت الروبوتات لبناء نموذج تعلم أفضل وأكثر شمولاً مما يمكن القيام به مع روبوت واحد (تتم معالجة أجزاء صغيرة من المعلومات ثم دمجها)، بناءً على مفهوم استكشاف المبنى وتخطيطات الغرف وتجميع البيانات وتحليلها بشكل مستقل لتكوّن قاعدة معرفية، حيث قام كل روبوت ببناء المعرفة الخاصة به ودمجها مع مجموعات بيانات الروبوتات الأخرى ، فتفوقت الخوارزمية الموزعة على الخوارزمية القياسية في إنشاء قاعدة المعرفة هذه.
على الرغم من أنه ليس نظامًا مثاليًا، لكن هذا النوع من نهج تعلم الآلة يسمح للروبوتات بمقارنة الكتالوجات أو مجموعات البيانات، وتعزيز الملاحظات المتبادلة والحذف الصحيح أو التعميم الزائد، وسوف يلعب دون شك دورًا في المستقبل القريب في العديد من التطبيقات الروبوتية، بما في ذلك المركبات ذاتية القيادة والطائرات بدون طيار/الدرون.
الخلاصة والتوقعات المستقبلية
تعرفنا في هذه المقالة على مفهوم الروبوت، وما مدى تطوّر صناعة الروبوتات باستخدام تعلم الآلة. فوجدنا أن تطوير وتقدم صناعة الروبوت يعتمد بشكل أساسي على تقانات وخوارزميات تعلم الآلة.
وأنّه سيتم في المستقبل الاستمرار في استثمار وتطوير الروبوتات ذاتية القيادة كالسيارات والطائرات بلا طيّار/درون، وستتواجد الروبوتات في المجال الطبي بشكل مألوف ومساعد في العمليات الأساسية، وكلما ازداد تطوّر الروبوتات واستخدامها للذكاء الصنعي وتعلم الآلة، ازدادت قدرتها في خدمة الإنسان وتلبية حاجاته.
المراجـــــع
- what-is-a-robot
- machine-learning-in-robotics
- a-brief-overview-of-imitation-learning
- inverse-optimal-control
- ml-semi-supervised-learning
- inside-machine-learning
- Chenxia Wu1, Jiemi Zhang2, Bart Selman3, Silvio Savarese4 and Ashutosh Saxena, Watch-Bot: Unsupervised Learning for Reminding Humans of Forgotten Actions, 2015.
- Alexandre Campeau-Lecours, Kinova Modular Robot Arms for Service Robotics Applications, 2017.
- collaborative-learning-for-robots