
التدّقيق العلمي: د. م. حسن قزّاز، م. محمد سرميني
التدّقيق اللّغوي: هبة الله فلّاحة
المحتويات
- مقدّمة:
- الكشف عن الأغراض وخوارزميّاته:
- خوارزميّة يولو وإصداراتها المختلفة:
- خوارزميّة YOLO-V7:
- تعريف الخوارزميّة وبنيتها العامّة:
- إصدارات الخوارزميّة والاختلافات فيما بينها:
- تقنيّات تحجيم النّموذج Compound Model Scaling:
- تخطيط إعادة ضبط البارامترات Re-parameterization:
- الرّؤوس المساعدة وتقنيّة تحويل العناوين الخشنة (العامّة) إلى دقيقة Auxiliary Head Coarse-to-Fine:
- نتائج الخوارزميّة والمقارنة مع الإصدارات السّابقة :
- نموذج عمليّ على تطبيقات يوليو الإصدار السّابع:
- بعض محدوديّات هذا الإصدار:
- الخلاصة:
- المراجع:
مقدّمة:
أصبحت دراسة وتطوير التّقنيّات _التي تُعنى بالرّؤية الحاسوبيّة والكشف عن الأغراض بالزّمن الحقيقيّ Real-time object detection_ مهمّة جدًّا مع تطوّر التّقنيّات الحديثة، والتي يتمّ استخدامها في بعض التّطبيقات الواقعيّة المهمّة كالواقع المعزّز وأنظمة الحماية والمراقبة والتّعرّف على الأشخاص ودعم السّيارات والرّوبوتات ذاتيّة القيادة ومعالجة الصّور الطّبيّة؛ والكثير من التّطبيقات المهمّة التي تتطلّب معالجة سريعة ودقيقة ذات نتائج موثوقة في الزّمن الحقيقيّ [1].
تمّ تطوير العديد من الخوارزميّات الحديثة التي حققت أداءً فعّالًا في مجال الرّؤية الحاسوبيّة في الزّمن الحقيقيّ، إلّا أنّ خوارزميّات يولو (yolo) بإصداراتها المختلفة تفوّقت على العديد منها ولا سيّما إصدارها الأخير السّابع ذو الميزات الفعّالة من حيث دقّة الكشف والكلفة الحسابيّة المنخفضة وسرعة المعالجة وسهولة التّدريب، ممّا يجعلها خيارًا مثاليًّا لمعالجة البيانات الضّخمة في تطبيقات الزّمن الحقيقيّ ويفتح المجال لدعم هذه التّطبيقات وتطويرها، في هذه المقالة سيتمّ شرح وتفصيل الإصدار السّابع من خوارزميّة يولو وميزاته وخصائصه وبنيته ومقارنته مع الإصدارات السّابقة من الخوارزميّة، كما سيتمّ عرض أمثلة عن تطبيقاتها[2].
الكشف عن الأغراض وخوارزميّاته:
يعتبر الكشف عن الأغراض تقنيّة مهمّة من تقنيّات الرّؤية الحاسوبيّة التي تعمل على اكتشاف وتحديد ومتابعة أغراض محدّدة من مقاطع صور أو فيديو، والتي يتمّ استخدامها في بعض التّطبيقات الواقعيّة المهمّة.

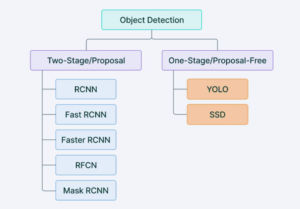
وتقسم خوارزميّات اكتشاف الغرض إلى نوعين أساسيّين بالاعتماد على عدد مرّات تمرير الصّورة المدخلة إلى الشّبكة؛ هما كواشف تعتمد على مرحلة وحيدة (single-shot detectors) وكواشف ذات مرحلتين (two-stage detectors).
كواشف تعتمد على مرحلة وحيدة (single-shot detectors) تعالج الصّورة ضمن مرحلة وحيدة وتكون ذات كلفة حسابيّة أقلّ، وأكثر فعاليّة من أجل تطبيقات الزّمن الحقيقيّ في البيئة ذات الموارد المحدودة، إلّا أنّها أقل دقّة من الخوارزميّات الأخرى وأقلّ فعاليّة في اكتشاف الأغراض الصّغيرة.
وكواشف ذات مرحلتين (two-stage detectors) حيث يتمّ معالجة الصّورة المدخلة وفق مرحلتين المرحلة الأولى لاكتشاف مواقع الكائنات المحتملة، والمرحلة الثّانية لتنقيح هذه المقترحات وتحديد التنبّؤات النّهائيّة، وتكون هذه الخوارزميّات أكثر دقّة من الطّرق الأخرى ولكنّها ذات كلفة حسابيّة عالية، وبالتّالي تُستخدم للتّطبيقات التي تكون ها الدّقّة عاملًا أساسيًّا [2].
خوارزميّة يولو وإصداراتها المختلفة:
يرمز مصطلح YOLO إلى “You Only Look One” أي أنت تنظر مرّة وحيدة وهذا يدلّ على آليّة عملها فهي تقوم بالمعالجة وفق مرحلة وحيدة single-shot detectors، تتضمّن هيكليّة نموذج هذه الخوارزميّة ثلاثة أجزاء هي البنية المركزيّة (العمود الفقريّ)، العنق والرّأس (كما هو موضّح بالشّكل (3)) وهي شبكة عصبونيّة ذات اتّصال كامل FCNN مكوّنة من شبكة عصبونيّة مطويّة (CNN) بسيطة لكشف الأغراض ذات البنية الموضّحة بالشّكل(4)، كما أنّ بعض الإصدارات منها تعتمد على المحوّلات Transformer ويوضّح الشّكل آليّة عمل هذه الخوارزميّة؛ حيث يتمّ تقسيم الصّورة إلى عدّة خلايا بأبعاد محدّدة ثمّ تكتشف كلّ خلية الكائنات الّتي تحتويها وتحدّد موقعها مع إحداثيّات المربّع المحيط (بالنسبة لإحداثيّاتها)، مع تسمية الكائن واحتمال وجود الشّيء في الخليّة [3]، [4].


يوجد عدّة إصدارات من خوارزميّة YOLO، كلّ نسخة منها تتفوّق بالدّقّة والأداء عن النّسخ السّابقة وهي:
- YOLO-V1 (2015)
- YOLO-V2 (2016)
- YOLO-V3 (2018)
- YOLO-V4 (2020)
- YOLO-V4 tiny (2021)
- YOLOR (2021)
- YOLOX(2021)
- NanoDet-Plus(2021)
- PP-YOLOE(2021)
- YOLOv5(2021)[4].
خوارزميّة YOLO-V7:
تعريف الخوارزميّة وبنيتها العامّة:
هي أحدث إصدار من سلسلة خوارزميّات يولو الشّهيرة التي تمّ إطلاقها في يوليو2022؛ حيث يوفّر نموذجًا أسرع وأدقّ من النّماذج السّابقة مع العديد من الميزات المحسّنة التي تحقّق أداء أفضل في تطبيقات الرّؤية الحاسوبيّة.
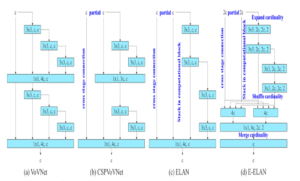
وتكون بنية هذا الإصدار مشتقّة من الإصدارات YOLOv4 و Scaled YOLOv4 و YOLO-R السّابقة حيث تمّ الاعتماد عليها كأساس لتطوير هذا الإصدار، كما تعتمد في بنيتها على شبكة تجميع طبقات فعّالة ممتدّة (E-ELAN (Extended Efficient Layer Aggregation Network، والتي تعتبر الكتلة الحسابيّة في بنية الخوارزميّة حيث تمّ تصميمها بالاعتماد على عدّة عوامل لتحسين السّرعة والدّقّة، كما تتضمّن مراحل داخليّة أساسيّة كالخلط والتّوسع والدّمج تمّت إضافتها من أجل تحسين عمليّة التّدريب المستمرّ للنّموذج دون التّأثير على مسار التدرّج الأساسيّ، أي تمكّن النموذج من التّعلّم بشكل أفضل ويوضّح الشّكل (5) البنية الدّاخليّة لهذه الكتلة متضمّنة عمليّات التّوسّع والخلط والدّمج وبعض البنى التي تمّ استخدامها في الإصدارات السّابقة، كما يعدّ استخدام صناديق الارتكاز _وهي مجموعة من الصّناديق المعرّفة مسبقًا بنسب عرض إلى ارتفاع مختلفة تُستخدم لكشف الأغراض ذات الأشكال المختلفة_ نقطة محسّنة لهذا الإصدار حيث يستخدم تسعة صناديق ارتكاز ممّا يسمح بكشف نطاق أوسع من أشكال وأحجام الأغراض مقارنة بالإصدارات السّابقة [1].
إصدارات الخوارزميّة والاختلافات فيما بينها:
يوجد عدّة نسخ مطوّرة من هذا الاصدار وهي YOLOv7 ،YOLOv7-tiny and ،YOLOv7-W6 ويمكن تلخيص الاختلافات الأساسيّة بين هذه النّسخ على النّحو التّالي:
- الإصدار الأساسيّ وهو نموذج تمّ تحسينه من أجل حوسبة GPU.
- الإصدار YOLOv7-tiny وهو نموذج مُحسَّن من أجل وحدات معالجة الحافة الحاسوبيّة، كما يدعم تقنيّة الحافة المخصّصة للذّكاء الاصطناعيّ Edge AI للتّخفيف من أعباء عمل التّعلّم العميق، وهو نموذج غير معقّد يدعم تطبيقات التّعلّم الآليّ على أجهزة الحوسبة المحمولة أو الخوادم والأجهزة الموزّعة المستخدمة في التّطبيقات الزّمن الحقيقيّ، كما يعتمد هذا الإصدار على تابع التّنشيط ReLU بينما باقي الإصدارات تعتمد على تابع التّنشيط SiLU.
- الإصدار YOLOv7-W6 هو نموذج أساسيّ مُحسَّن لحوسبة وحدة معالجة الرّسوميّات السّحابيّة cloud GPU computing والتي تستخدم من أجل معالجة عمليّات التّعلّم العميق والذّكاء الاصطناعيّ الضّخمة في السّحابة [4].
تقنيّات تحجيم النّموذج Compound Model Scaling:
يحتاج المبرمجون إلى استخدام نماذج ملائمة من الخوارزميّة تتوافق مع تطبيقاتهم المختلفة، فبعض التّطبيقات تتطلّب دقّة عالية بينما تركّز بعض التّطبيقات الأخرى على السّرعة، لذلك تتمّ عمليّة تحجيم النّموذج لجعله ملائمًا لهذه التّطبيقات حيث يتمّ الأخذ بعين الاعتبار حجم الصّورة المدخلة Resolution، عدد المداخل(عرض النموذج)Width، عدد الطّبقات (عمق النّموذج)Depth والمرحلة Stage.
في بعض النّماذج التي تعتمد على التّسلسل كشبكات ResNet أو PlainNet تؤثّر عمليّة التّحجيم على جميع الميزات معًا ممّا يؤدّي إلى عدم القدرة على تعميم النّموذج، إلّا أنّ عمليّة التّحجيم في هذه الخوارزميّة لا تؤثّر على الميزات العامّة ممّا تجعلها ملائمة للتّطبيقات المختلفة من دون تغيّر في خصائص النّموذج الأساسيّ.
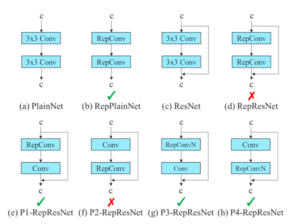
يوضّح الشّكل (6) عمليّة التّحجيم لنماذج تعتمد على التّسلسل (a) و (b)، حيث نلاحظ ازدياد الكتلة الحسابيّة عند ازدياد عمق النّموذج والتي تزيد بدورها حجم دخل الطّبقة التّالية، ولكن مع الطّريقة المقترحة في الشّكل (c) تمّ تحجيم عمق الشّبكة وعرضها بالتّنسيق مع ربط الطّبقات معًا، ونلاحظ أنّ هذه الطّريقة تحافظ على بنية النّموذج بشكل مثاليّ أثناء عمليّة التّحجيم [1].
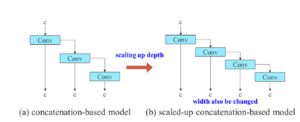
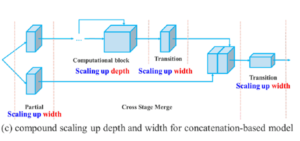
الشّكل (6) شرح تقنيّات تحجيم النّموذج [1].
تخطيط إعادة ضبط البارامترات Re-parameterization:
هي تقنيّة تستخدم بعد التّدريب من أجل تحسين النّموذج يؤدّي استخدامها إلى زيادة زمن التّدريب ولكن يحسّن من دقّة النّتائج، وتشمل حساب المتوسّط لأوزان النّموذج لإنشاء نموذج أكثر قوّة، كما يوجد نوعان من هذه التّقنيّات على مستوى النّموذج وعلى مستوى أجزاء النّموذج.
في هذا البحث تمّ التّركيز على تقنيّة إعادة ضبط البارامترات على مستوى أجزاء النّموذج، حيث يكون لكلّ جزء من الشّبكة تقنيّة إعادة ضبط بارامترات موافقة له، كما تمّ التّركيز على تقنيّة مسارات التّدفق المتدرّج gradient flow propagation paths لمعرفة أيّ جزء من الشّبكة بحاجة إلى إعادة ضبط بارامترات، ويوضّح الشّكل (6) عدّة تجارب لإعادة ضبط البارامترات من أجل نموذج yolo v7 المدروس [1].
الرّؤوس المساعدة وتقنيّة تحويل العناوين الخشنة (العامّة) إلى دقيقة Auxiliary Head Coarse-to-Fine:
تتضمّن هيكليّة نموذج هذه الخوارزميّة ثلاثة أجزاء هي البنية المركزيّة (العمود الفقريّ)، العنق والرّأس (كما هو موضّح بالشّكل (3))، يتمّ عرض خرج الشّبكة الذي تمّ التّنبّؤ به في الرّأس ولا تقتصر هذه الخوارزميّة على وجود رأس وحيد بل تتضمّن عدّة رؤوس، يسمّى الرّأس الأخير بالرّأس القائد Lead Head، بينما تسمّى الرّؤوس المتوسّطة التي تساعد بعمليّة التّدريب في الطّبقات الوسطى بالرّؤوس المساعدة Auxiliary Head.
يساعد تابع الخسارة المساعد في تحديث أوزان الرّؤوس المساعدة، وهذا يقوم بتحسين تدريب النّموذج ويدعم الإشراف العميق، هذه المفاهيم تكون مرتبطة بشكل أساسيّ مع الرّأس القائد ومحدّد العناوين Label Assigner وهو تقنيّة تقارن نتائج التنبّؤ للشّبكة مع النّتائج الحقيقة، وعلى أساسها تقوم بوضع عناوين دقيقة تأخذ في الاعتبار نتائج تنبّؤ الشّبكة مع الحقيقة الأساسيّة ثمّ تقوم بتعيين تسميات دقيقة (جزئيّة)soft labels، كما أنّ محدّد العناوين يقوم بتعيين عناوين دقيقة (جزئيّة) وعناوين صلبة (عامّة).
وتكون الآليّة العامّة موضّحة من خلال الشّكل (8) حيث يقوم الرّأس القائد بتوقّع النّتائج النّهائيّة، ويتمّ إنشاء العناوين الدّقيقة بناءً على هذه النّتائج النّهائيّة، كما أنّ الخسارة تُحسب لكلّ من الرّأس القائد والرّؤوس المساعدة بناءً على هذه العناوين الدّقيقة التي تمّ إنشاؤها، يتمّ الاعتماد بشكل أساسيّ على العناوين الدّقيقة وذلك لأنّ الرّأس القائد لديه قدرة تعلّم قويّة، ولذلك يجب أن تكون العناوين الدّقيقة النّاتجة عنه أكثر تمثيلًا للتّوزيع والارتباط بين بيانات المصدر والهدف، وذلك من خلال السّماح للرّأس المساعد بالتّعرّف مباشرة على المعلومات التي قام الرّأس القائد بالتّعرّف عليها، وهذا يعزّز من قدرة الرّأس القائد بالتّعرّف على المعلومات التّالية.
أمّا في العمليّة التّالية تحويل العناوين من خشنة إلى دقيقة coarse-to-fine labels يتمّ توليد نوعين من العناوين الدّقيقة، عناوين دقيقة لتدريب الرّأس القائد، ومجموعة من العناوين الخشنة (العامّة) لتدريب الرّؤوس المساعدة [1].
يوضّح الشّكل (8) العمليّات السّابقة بالتّفصيل؛ حيث يكون النّموذج الأساسيّ (b)، (a) النموذج بعد إضافة رؤوس مساعدة، (c)توليد العناوين الدّقيقة، (d) تدريب الرّأس القائد من خلال العناوين الدّقيقة، (e) توليد العناوين الدّقيقة من أجل تدريب الرّأس القائد والخشنة (العامّة) من أجل الرّؤوس المساعدة [1].
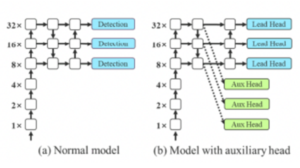
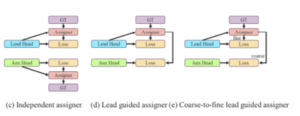
الشكل (8): مراحل تقنيّة الرّؤوس المساعدة وتقنيّة تحويل العناوين الخشنة (العامّة) إلى دقيقة [1].
نتائج الخوارزميّة والمقارنة مع الإصدارات السّابقة :
يتفوّق هذا الإصدار من الخوارزميّة على الإصدارات السّابقة من حيث دقّة وسرعة المعالجة بنسبة 5 إطار في الثّانية إلى 160 إطارًا في الثّانية؛ وهذا يجعلها الأنسب لتطبيقات الوقت الحقيقيّ مثل المراقبة والسّيارات ذاتيّة القيادة، حيث تعدّ سرعات المعالجة العالية أمرًا بالغ الأهميّة. ومن أجل المقارنة بين النماذج تمّ الاعتماد على قاعدة بيانات( coco dataset (common Objects in Context وذلك كما هو موضّح بالشّكل (9) التّالي:

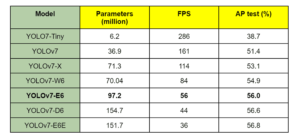
كما يوضّح الجدول (1) التّالي مقارنة عامّة لإصدار يولو السّابع مع الخوارزميّات السّابقة؛ من حيث عدد البارامترات والحجم والدّقّة على عدّة مستويات:

كما يوضّح الجدول (1) التّالي مقارنة عامّة لإصدار يولو السّابع مع الخوارزميّات السّابقة؛ من حيث عدد البارامترات والحجم والدّقّة على عدّة مستويات:
ويمكن تلخيص إسهامات هذا الإصدار من خلال النّتائج التّالية:
- تمّ الاعتماد على صناديق الارتكازanchor boxes؛ حيث تتضمّن تسعة صناديق ارتكاز ممّا يزيد من قدرة هذا الإصدار على اكتشاف نطاق أوسع من الكائنات ذات الأبعاد والأحجام المختلفة متفوّقة بذلك على الإصدارات السّابقة.
- من أهمّ التّحسينات التي يشملها هذا الإصدار هو استخدام تابع الخسارة البؤريّ (focal loss) بدلًا من استخدام تابع الخسارة الانتروبيا المتقاطعة cross-entropy loss function المستخدم في الإصدارات السّابقة؛ والذي يكون أقلّ فعاليّة في اكتشاف الكائنات الصّغيرة، فحلّ هذه المشكلة تكون من خلال تقليل الخسارة للحالات التي تمّ تصنيفها بشكل صحيح والتّركيز على الحالات التي يصعب اكتشافها.
- كما يتفوّق هذا الإصدار عن الإصدارات السّابقة من حيث دقّة معالجة الصّور والتي تبلغ 608×608 بكسل، والتي تمكّن من اكتشاف الأجسام الصّغيرة.
- يتميّز هذا الإصدار من حيث سرعة المعالجة والتي تبلغ 160 إطارًا في الثّانية، متفوّقة على خوارزميّات اكتشاف الكائنات الحديثة ممّا يجعلها الخيار الأمثل لتطبيقات الزّمن الحقيقيّ كالمراقبة والسّيارات ذاتيّة القيادة.
- وبمقارنة دقّة التّصنيف مع تقنيّات اكتشاف الكائنات الحديثة، نجد أنّ هذا الإصدار يتفوّق عليها بمتوسّط 37.2% عند عتبة 0.5 من أجل قاعدة بيانات coco، وعلى الرّغم من ذلك تتفوّق خوارزميّات اكتشاف الكائنات ذوات المرحلتين مثل Faster R-CNN و Mask R-CNN على الإصدار السّابع من خوارزميّة يولو من حيث دقّة التّصنيف إلّا أنّها تتطلّب زمنًا أعلى [6].
نموذج عمليّ على تطبيقات يوليو الإصدار السّابع:
في هذا المثال سيتمّ تطبيق نماذج YOLOv7 و YOLOv7-Tinyوالمقارنة مع نماذج YOLOv5 و YOLOv4.
في البداية يتمّ استدعاء مستودع YOLOv7 GitHub،بعد ذلك يمكنك استخدام الملفّ script.py النّصيّ لتشغيل التّعرّف على مقاطع الفيديو التي سيتمّ اختيارها، كما سيتمّ تنزيل نموذجَي yolov7-tiny.pt و yolov7.pt المدرّبين مسبقًا
في هذه الجزئيّة سيتمّ مناقشة عدّة سيناريوهات لاختبار الخوارزميّة
- السّيناريو الأوّل: اختبار الخوارزميّة من أجل الأغراض البعيدة والصّغيرة.
- السّيناريو الثّاني: يعرض حالات ازدحام.
- السّيناريو الثّالث: يتضمّن معظم الحالات التي تعذّر على الإصدارات السّابقة كشفها بشكل صحيح.
سيتمّ عرض النّتائج من أجل الفيديوهات الثّلاثة عند تطبيق النّموذج الأساسيّ من الخوارزميّة، وعند تطبيق نموذج tiny عليها فيُسمح بالمقارنة بينهما بشكل دقيق [6].
السّيناريو الأوّل:
رابط الفيديو من أجل خوارزميّة YOLO7-Tiny (حالة الأغراض الصّغيرة والبعيدة)
رابط الفيديو من أجل الخوارزميّة الأساسيّة (حالة الأغراض الصّغيرة والبعيدة)
ومن خلال الفيديوهين السّابقين نلاحظ أنّه لا يمكن اكتشاف السّيارات والدّراجات النّاريّة والأشخاص البعيدين جدًّا والصّغار من خلال خوارزميّة YOLO7-Tiny على الرّغم من سرعتها الكبيرة التي تبلغ حوالي 42 إطارًا في الثّانية، بينما يمكن لنموذج YOLOv7 اكتشاف هذه الأغراض بشكل أفضل، ولكن تبلغ سرعتها حوالي 19 إطارًا في الثّانية [6].
السّيناريو الثّاني:
رابط الفيديو من أجل خوارزميّة YOLO7-Tiny (حالة الازدحام)
رابط الفيديو من أجل الخوارزميّة الأساسيّة (حالة الازدحام)
ونلاحظ أنّه يمكن لنموذج YOLOv7 اكتشاف الأشخاص بدقّة ووثوقيّة أكبر مقارنة بنموذج YOLOv7-Tiny، كما أنّ YOLOv7-Tiny يهمل إشارات المرور والأشخاص البعيدين [6]. Translation is too long to be saved
السّيناريو الثّالث:
يمكن أن نلاحظ بعض الأخطاء العامّة في كلا النّموذجين كتحديد إشارات المرور الأخرى على أنّها إشارة توقّف، وتصنيف بعض الطّرق المحظورة كأشخاص بشكل خاطئ، وهذه الأخطاء شائعة بالنّماذج السّابقة مثل YOLOv4 و YOLOv5.
تُظهر مقاطع الفيديو الثّلاثة التّالية مقارنة بين YOLOv4 و YOLOv5-Large ونموذج YOLOv7، والتي تقدّم فكرة نوعيّة مناسبة عن كيفيّة أداء كلّ نموذج عبر سيناريوهات مختلفة.
YOLOv4
YOLOv5-Large
YOLOv7
كما يوضّح الجدول (3) معدّل الإطارات في الثّانية FPS، وزمن التعرّف inference time للمتغيّرات المختلفة للنّماذج الثّلاثة على مقاطع الفيديو الثّلاثة.
الجدول (3) معدّل الإطارات في الثّانية FPS، وزمن التعرّف inference time للمتغيّرات المختلفة للنّماذج الثّلاثة على مقاطع الفيديو الثّلاثة [6].

بعض محدوديّات هذا الإصدار:
- قد يفشل هذا الإصدار في اكتشاف الأشياء بدقّة في حالات المشاهد المزدحمة أو عندما تكون الأشياء بعيدة عن الكاميرا.
- لا تحقّق الخوارزميّة أداء مثاليًّا من حيث اكتشاف الأشياء الصّغيرة والكبيرة جدًّا مقارنة ببقيّة الأشياء في الصّورة.
- يكون هذا الإصدار حسّاسًا للتّغيّرات في الإضاءة أو الظّروف المحيطيّة الأخرى، لذا لا يكون مناسبًا من أجل تطبيقات الزّمن الحقيقيّ التي تتضمّن تباينات في ظروف الإضاءة.
- قد يكون الإصدار ذا كلفة حسابيّة عالية، وبالتّالي يصعب استخدامه لتطبيقات الزّمن الحقيقيّ على الأجهزة ذات الموارد المحدودة [10].
الخلاصة:
في هذا المقال تعرّفنا على YOLO-v7 وهي خوارزميّة هامّة لاكتشاف الأغراض، حيث أحدثت ثورة في مجال الرّؤية الحاسوبيّة تتميّز بالسّرعة والفعاليّة، وحقّقت أداءً متميّزًا من حيث عدّة معايير ممّا جعلها الاختيار الأمثل من أجل معالجة الصّور وتطبيقات اكتشاف الكائنات في الزّمن الحقيقيّ؛ كمراقبة الفيديو والسّيارات ذاتيّة القيادة والواقع المعزّز، كما أنّها تتميّز ببنية بسيطة وتتطلّب حدًّا أدنى من البيانات للتّدريب ممّا يجعلها سهلة التّنفيذ ومتكيّفة، وعلى الرّغم من ذلك فإنّها ذات محدوديّة في اكتشاف الكائنات الصّغيرة والتّصنيف الدّقيق لها، ممّا يفتح المجال للباحثين بالتّقدّم بالعديد من الدّراسات المتطوّرة في مجال الرّؤية الحاسوبيّة.
المراجع:
- https://arxiv.org/pdf/2207.02696.pdf
- https://www.v7labs.com/blog/yolo-object-detection
- https://2u.pw/vAkfXq
- https://viso.ai/deep-learning/yolov7-guide/
- https://2u.pw/PyP6bY
- https://2u.pw/BqAa4V
- https://arxiv.org/abs/2004.10934.pdf
- https://arxiv.org/abs/2011.08036
- https://arxiv.org/abs/2105.04206
- https://2u.pw/OMSEcJ




